Problem Set #5¶
Assigned: May 5, 2022
Due: May 12, 2022
Background¶
Lectures 10, 11, and 12
Short excursus on Function Objects and More on Lambda
Introduction¶
This assignment is extracted as with the previous assignment into a directory ps5.
Extract the homework files¶
Create a new subdirectory named “ps5” to hold your files for this
assignment. The files for this assignment are in a “tar ball” that can be
downloaded with ps5.tar.gz.
To extract the files for this assignment, download the tar ball and copy it (or move it) to your ps5 subdirectory. From a shell program, change your working directory to be the ps5 subdirectory and execute the command
$ tar zxvf ps5.tar.gz
The files that should be extracted from the tape archive file are
AOSMatrix.hpp: Header file for array-of-structs sparse matrix
COOMatrix.hpp: Header file for coordinate struct-of-arrays sparse matrix
CSCMatrix.hpp: Header file for compressed sparse column matrix
CSRMatrix.hpp: Header file for compressed sparse row matrix
Makefile: Makefile
Matrix.hpp: Header for simple dense matrix class
Timer.hpp: Header for simple timer class
Vector.hpp: Header for simple vector class
amath583.{cpp,hpp}: Source and header for basic math operations
amath583IO.{cpp,hpp}: Source and header for file I/O
amath583sparse.{cpp,hpp}: Source and header for sparse operations
bonnie_and_clyde.cpp, bonnie_and_clyde_function_object.cpp: Demo files for bonnie and clyde
catch.hpp: Catch2 header file
cnorm.{cpp,hpp}, cnorm_test.cpp: Driver, header, and test program for cyclic parallel norm
data/ : Some test data files (including Erdos02)
fnorm.{cpp,hpp}, fnorm_test.cpp: Driver, header, and test program for task based parallel norm
matvec.cpp, matvec_test.cpp: Driver and test programs for sparse matrix-vector product
norm_order.cpp, norm_test.cpp: Driver test and program for different implementations of two_norm
norm_utils.hpp: Helper functions for norm driver programs
pagerank.{cpp,hpp}, pagerank_test.cpp: Driver, header, and test program for pagerank
pmatvec.cpp, pmatvec_test.cpp: Parallel matvec driver and test programs
pnorm.{cpp,hpp}, pnorm_test.cpp: Driver, header, and test program for block partitioned parallel norm with threads
pr.py: Python pagerank implementation
rnorm.{cpp,hpp}, rnorm_test.cpp: Driver, header, and test program for divide-and-conquer parallel norm
verify-{all,make,opts,run,test}.bash: Verification scripts for programs in this assignment
You may or may not notice, in this makefile of this assignment, we have updated from C++11 to C++17 for the C++ language standard. Many new features have been added to C++17 comparing with C++11, or C++14.
Preliminaries¶
std::Futures¶
C++ provides the mechanism to enable execution of a function call as an asynchronous task. Its semantics are important. Consider the example we have been using in lecture.
typedef size_t size_t;
size_t bank_balance = 300;
static std::mutex atm_mutex;
static std::mutex msg_mutex;
size_t withdraw(const std::string& msg, size_t amount) {
std::lock(atm_mutex, msg_mutex);
std::lock_guard<std::mutex> message_lock(msg_mutex, std::adopt_lock);
std::cout << msg << " withdraws " << std::to_string(amount) << std::endl;
std::lock_guard<std::mutex> account_lock(atm_mutex, std::adopt_lock);
bank_balance -= amount;
return bank_balance;
}
int main() {
std::cout << "Starting balance is " << bank_balance << std::endl;
std::future<size_t> bonnie = std::async(withdraw, "Bonnie", 100);
std::future<size_t> clyde = std::async(deposit, "Clyde", 100);
std::cout << "Balance after Clyde's deposit is " << clyde.get() << std::endl;
std::cout << "Balance after Bonnie's withdrawal is " << bonnie.get() << std::endl;
std::cout << "Final bank balance is " << bank_balance << std::endl;
return 0;
}
Here we just show the withdraw function. Refer to the full source code
for complete implementation bonnie_and_clyde.cpp .
Note that we have modified the code from lecture so that the deposit and withdrawal functions return a value, rather than just modifying the global state.
Compile and run the bonnie_and_clyde program several times. Does it
always return the same answer?
On my laptop I ran the example and obtained the following results (which were different every time):
$ ./bonnie_and_clyde.exe
Starting balance is 300
Bonnie withdraws 100
Balance after Clyde\'s deposit is Clyde deposits 100
300
Balance after Bonnie\'s withdrawal is 200
Final bank balance is 300
$ ./bonnie_and_clyde.exe
Starting balance is 300
Balance after Clyde\'s deposit is Clyde deposits 100
Bonnie withdraws 100
400
Balance after Bonnie\'s withdrawal is 300
Final bank balance is 300
$ ./bonnie_and_clyde.exe
Starting balance is 300
Bonnie withdraws 100
Clyde deposits 100
Balance after Clyde\'s deposit is 300
Balance after Bonnie\'s withdrawal is 200
Final bank balance is 300
$ ./bonnie_and_clyde.exe
Starting balance is 300
Balance after Clyde\'s deposit is Bonnie withdraws 100
Clyde deposits 100
300
Balance after Bonnie\'s withdrawal is 200
Final bank balance is 300
See if you can trace out how the different tasks are running and being interleaved. Notice that everything is protected from races – we get the correct answer at the end every time.
Note the ordering of calls in the program:
std::future<size_t> bonnie = std::async(withdraw, "Bonnie", 100);
std::future<size_t> clyde = std::async(deposit, "Clyde", 100);
std::cout << "Balance after Clyde's deposit is " << clyde.get() << std::endl;
std::cout << "Balance after Bonnie's withdrawal is " << bonnie.get() << std::endl;
That is, the ordering of the calls is Bonnie makes a withdrawal, Clyde makes a deposit, we get the value back from Clyde’s deposit and then get the value back from Bonnie’s withdrawal. In run 0 above, that is how things are printed out: Bonnie makes a withdrawal, Clyde makes a deposit, we get the value after Clyde’s deposit, which is 300, and we get the value after Bonnie’s withdrawal, which is 200. Even though we are querying the future values with Clyde first and Bonnie second, the values that are returned depend on the order of the original task execution, not the order of the queries.
But let’s look at run 2. In this program, there are three threads: the main thread (which launches the tasks), the thread for the bonnie task and the thread for the clyde task. The first thing that is printed out after the tasks are launched is from Clyde’s deposit. But, before that statement can finish printing in its entirety, the main thread interrupts and starts printing the balance after Clyde’s deposit. The depositing function isn’t finished yet, but the get() has already been called on its future. That thread cannot continue until the clyde task completes and returns its value. The clyde task finishes its cout statement with “100”. But then the bonnie task starts running - and it runs to completion, printing “Bonnie withdraws 100” and it is done. But, the main thread was still waiting for its value to come back from the clyde task – and it does – so the main thread completes the line “Balance after Clyde’s deposit is” and prints “400”. Then the next line prints (“Balance after Bonnie’s withdrawal”) and the program completes.
Try to work out the sequence of interleavings for run 1 and run 3. There
is no race condition here – there isn’t ever the case that the two tasks
are running in their critical sections at the same time. However, they
can be interrupted and another thread can run its own code – it is only
the critical section code itself that can only have one thread executing
it at a time. Also note that the values returned by bonnie and clyde can
vary, depending on which order they are executed, and those values are
returned by the future, regardless of which order the futures are
evaluated.
std::future::get¶
Modify your bonnie_and_clyde program in the following way. Add a
line in the function after the printout from Bonnie’s withdrawal to
double check the value:
std::cout << "Balance after Clyde's deposit is " << clyde.get() << std::endl;
std::cout << "Balance after Bonnie's withdrawal is " << bonnie.get() << std::endl;
std::cout << "Double checking Clyde's deposit " << clyde.get() << std::endl;
(The third line above is the one you add.) What happens when you compile and run this example? Why do you think the designers of C++ and its standard library made futures behave this way?
Callables¶
We have looked at two ways of specifying concurrent work to be executed in parallel: threads and tasks. Both approaches take an argument that represents the work that we want to be done (along with additional arguments to be used by that first argument). One kind of thing that we can pass is a function.
void pi_helper(int begin, int end, double h) {
for (int i = begin; i < end; ++i) {
pi += (h*4.0) / (1.0 + (i*h*i*h));
}
}
int main() {
// ...
std::thread(pi_helper, 0, N/4, h); // pass function
return 0;
}
The interfaces to thread and to async are quite general. In fact, the type of the thing being passed in is parameterized.
What is important about it is not what type it is, but rather what kinds of expressions can be applied to it.
To be more concrete,
the C++11 declaration for async is the following:
template< class Function, class... Args>
std::future<std::result_of_t<std::decay_t<Function>(std::decay_t<Args>...)>>
async( Function&& f, Args&&... args );
There are a number of advanced C++ features being used in this declaration, but the key thing to note is that, indeed,
the first argument f is of a parameterized type (Function).
The requirements on whatever type is bound to Function are not that it be a function, but rather that it be Callable.
Meaning, if f is Callable, we can say this as a valid expression:
f();
Or, more generally
f(args);
This is purely syntactic – the requirement is that we be able to write down the name of the thing that is Callable, and put some parentheses after it (in general with some other things inside the parentheses).
Of course, a function is one of the things that we can write down and put some parentheses after. But we have also seen in C++ that we can overload operator() within a class. Objects of a class with operator() can be written down with parentheses – just like a function call. In fact, this is what we have been doing to index into Vector and Matrix.
We can also create expressions that themselves are functions (“anonymous functions” or lambda expressions).
One way of thinking about thread and async is that they are “higher-order functions” – functions that operate on other functions.
As you become more advanced in your use of C++, you will find that many common computational tasks can be expresses as higher order functions.
A bit more information about function objects and lambdas can be found as excursus: Function Objects and Lambda . Lambda is also covered in Lecture 13. There is also an example of function objects for our bank account example in the file bonnie_and_clyde_function_object.cpp.
Parallel Roofline¶
We have been using the roofline model to provide some insight (and some quantification) of the performance we can expect for sequential computation, taking into account the capabilities of the CPU’s compute unit as well as the limitations imposed by the memory hierarchy. These same capabilities and limitations apply once we move to multicore (to parallel computing in general). Some of the capabilities scale with parallelism – the available compute power scales with number of cores, as does the bandwidth for any caches that are directly connected to cores. The total problem size that will fit into cache also scales. Shared cache and main memory do not.
For the intrepid, you can run the docker images amath583/ert.openmp.2, amath583/ert.openmp.4, and amath583/ert.openmp to run the ERT on 2, 4, and 8 threads / cores. You can get the sequential profile from amath583/ert. Instructions are the same as from ps4.
Theoretically, the maximum performance of 8 cores should be 8 times than the maximum performance of single core, as well as the maximum bandwidth of L1/L2 caches (as they are private). The main memory bandwidth of 8 cores should stay the same as the main memory bandwidth of single core.
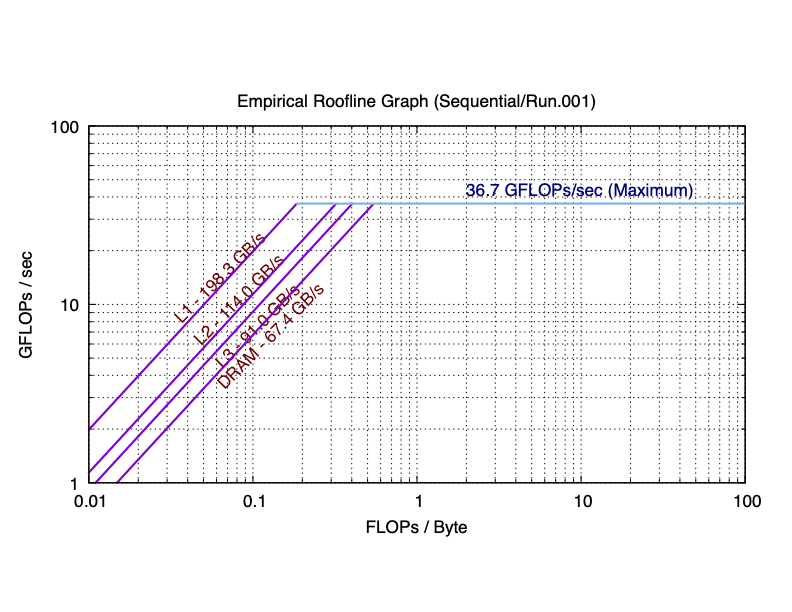
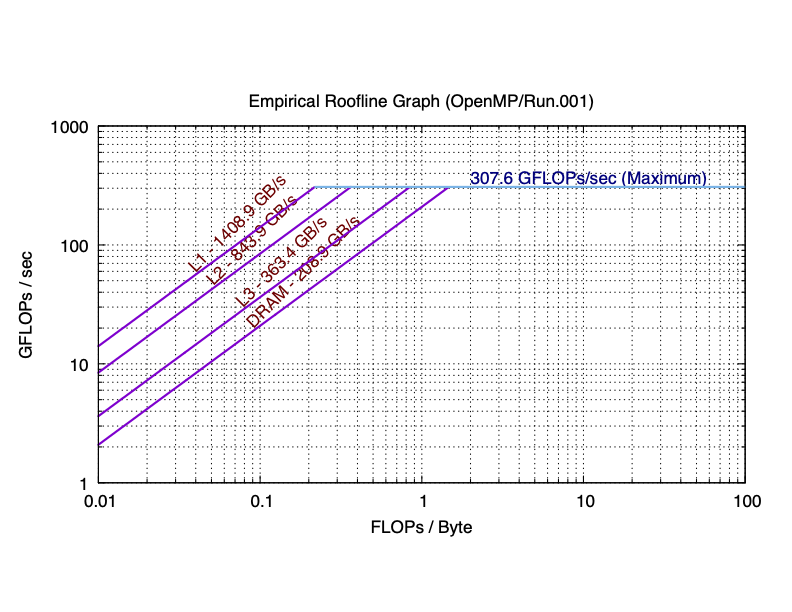
The sequential and 8 core results for my laptop are plotted as the following:
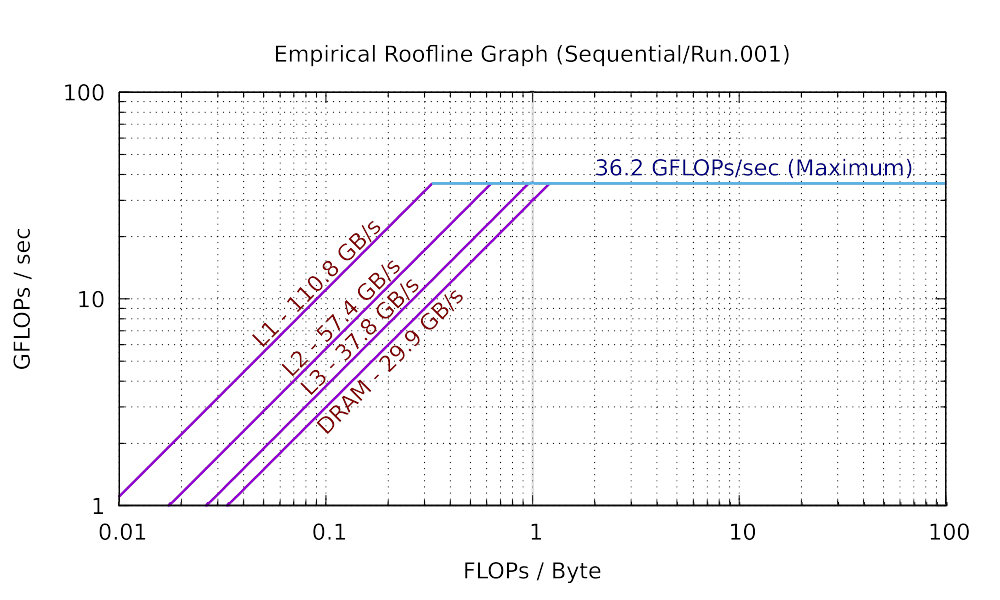
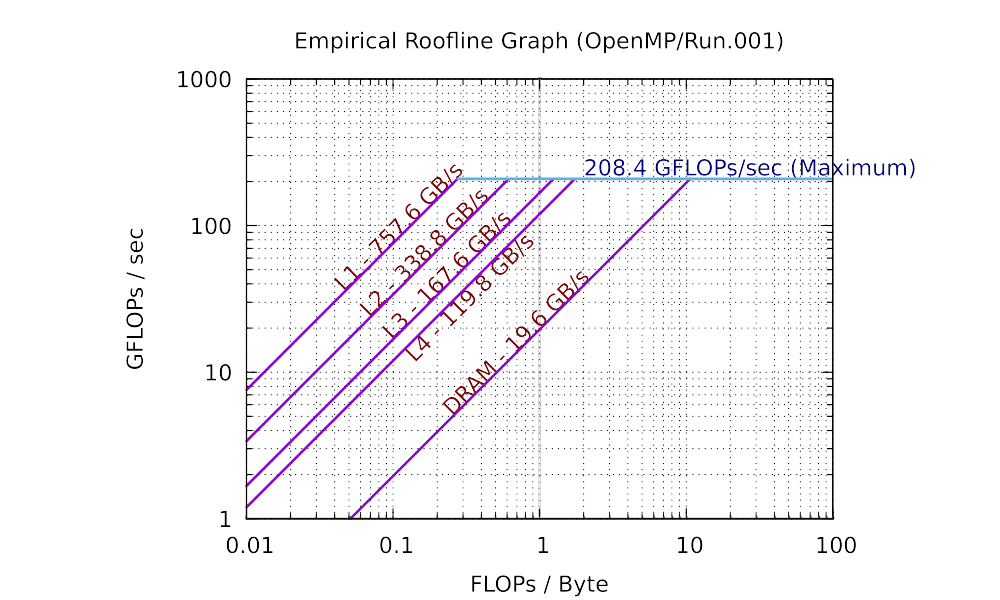
As you can see in practice, the maximum performance of 8 cores is 5.76 times (much smaller than 8 times) than the maximum performance of single core. The total bandwidth of the L1 cache of 8 cores is 6.84 times (still smaller than 8 times) than the bandwidth of the L1 cache of single core. You can observe similar trend in L2, and L3 caches. However, the bandwidth of the main memory of 8 cores is only has 66.2% of that of single core. This is because the main memory is shared among all cores. If you are not clear about why the parallel roofline model differs from the sequential roofline model, start a discussion on Piazza.
If you want to refer to a roofline model when analyzing some of your results for this assignment, you can either generate your own, refer to mine above, or estimate what yours would be based on what will and will not scale with number of cores.
Note
If you are using Apple M1 Chip or M1 Max, you can use the ones I generated in this assignment.
Here are the sequential and parallel roofline results I got for Apple M1.
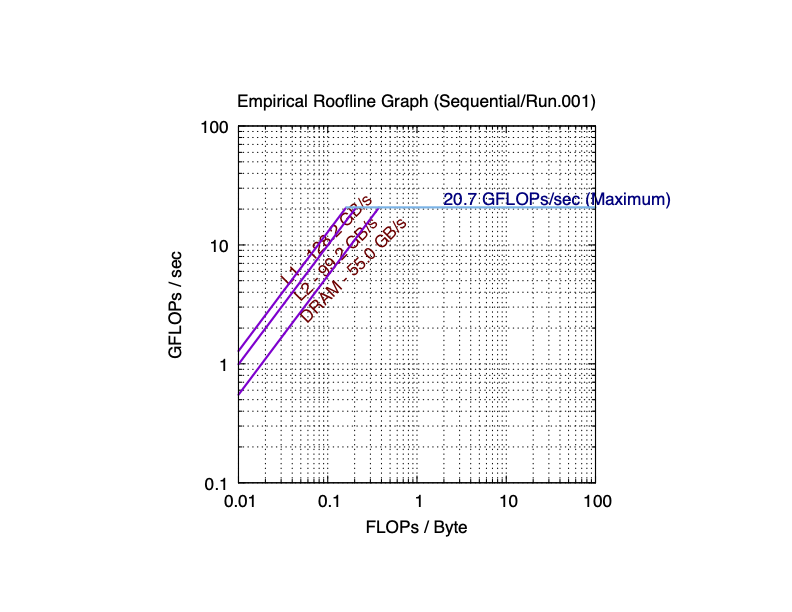
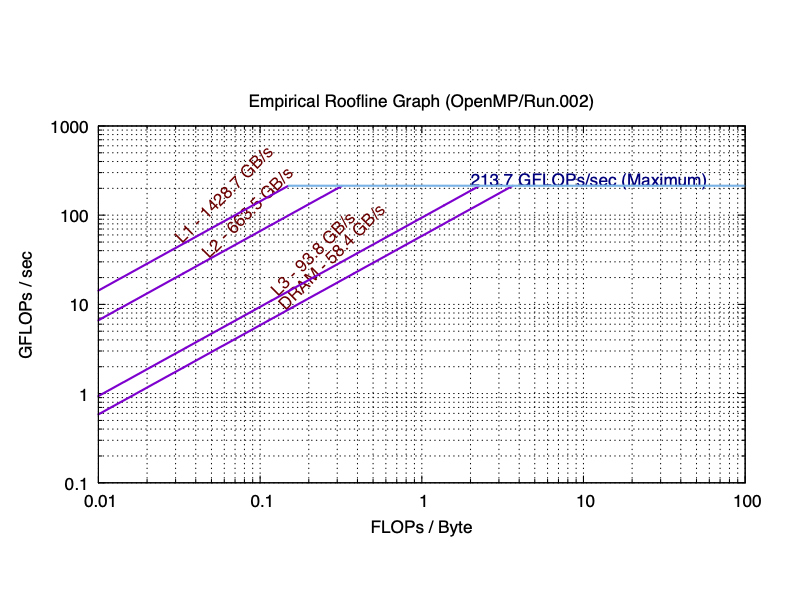
As you can see in practice, the maximum performance of 8 cores (according to Apple, M1 has 4 performance cores and 4 efficiency cores) is 10 times (more than 8 times) than the maximum performance of single core. The total bandwidth of the L1 cache of 8 cores is 11.1 times (still more than 8 times) than the bandwidth of the L1 cache of single core. For L2 cache, 8-core is 7.43 times than single core. L3 cache was failed to be detected on single core. However, the bandwidth of the main memory of 8 cores is very close to that of single core. This is because the main memory is shared among all cores. If you are not clear about why the parallel roofline model differs from the sequential roofline model, start a discussion on Piazza.
Here are the sequential and parallel roofline results I got for Apple M1 Max.
For M1 Max, I leave it for you to compute the performance difference in the plots.
Extra Credit¶
You may or may not notice that, since L1/L2 caches are private, the total bandwidth of them is definitively (much) more than that of the single core. However, because the DRAM is shared among all cores, the comparison between the bandwidth of the DRAM of 8 cores and that of the single core is more complicated. In the first Intel-CPU plot, we see the parallel bandwidth is smaller than the sequential one. In the Apple M1 plot, the parallel bandwidth is close to the sequential one. In the Apple M1 Max, the parallel bandwidth is almost 3 times than the sequential one.
If you are interested in this phenomenon, here is a hint for you to dive deep. What is the difference between SDRAM DDR4 and SDRAM DDR5 in terms of bandwidths? Wikipidia is a good starting point for investigation. DDR4 is the SDRAM type on my Intel machine and Apple M1 machine. Intel machine has one DRAM, Apple M1 machine has two. Hence the total bandwidths of Apple M1 will be twice than the bandwidth of the Intel machine. DDR5 is the DRAM type on Apple M1 Max machine, this machine has two of them (hence the total bandwidths will double). Why such difference would cause the bandwidth difference in the sequential roofline and the parallel roofline plots? You are welcomed to share your exploration process on Piazza.
Note
The first person who shares the correct answer on Piazza will get extra credit on this.
Warm Up¶
Norm!¶
In lecture (and in previous assignments)
we introduced the formal definition of vector spaces as a
motivation for the interface and functionality of our Vector class.
But besides the interface syntax, our Vector class needs to also
support the semantics. One of the properties of a vector space is
associativity of the addition operation, which we are going to verify
experimentally in this assignment.
We have previously defined and used the function
double two_norm(const Vector& x);
prototyped in amath583.hpp and defined in amath583.hpp.
In your source directory is a file norm_order.cpp that is the driver
for this problem. It currently creates a Vector v and then
invokes versions of two_norm on it four times, checking the results against that
obtained by the first invocation.
The first invocation of two_norm is saved to the value norm0.
We invoke two_norm a second time on v and save that value to norm1.
We then check that
norm0 and norm1 are equal.
As the program is delivered to you it also invokes two_norm_r on v and
two_norm_s` on ``v (for “reverse” and “sorted”, respectively). The program
also prints the absolute and relative differences between the values returned from
two_norm_r and two_norm_s with the sequential two_norm
to make sure the returned values are the same. The functions two_norm_r and two_norm_s
are defined in amath583.cpp.
Absolute and relative differences are computed this way:
if (norm2 != norm0) {
std::cout << "Absolute difference: " << std::abs(norm2-norm0) << std::endl;
std::cout << "Relative difference: " << std::abs(norm2-norm0)/norm0 << std::endl;
}
(This is for norm2 - the code for the others should be obvious.)
Modify the code for two_norm_r in amath583.cpp so that it adds the values of v in reverse of the order given.
I.e., rather than looping from 0 through num_rows()-1, loop from num_rows()-1 to 0.
Note
size_t
In almost all of the for loops we have been using in this course, I have written them using a size_t
for (size_t i = 0; i < x.num_rows(); ++i) {
// ..
}
In C++ a size_t is unsigned and large enough to be able to index the largest thing representable in the system it is being compiled with.
For all intents and purposes that means it is an unsigned 64-bit integer.
Be careful if you are going to use a size_t to count down.
What happens with the following code, for example:
int main() {
size_t i = 1;
assert(i > 0);
i = i - 1; // subtract one from one
assert(i == 0);
i = i - 1; // subtract one from zero
assert(i < 0);
return 0;
}
Do you expect all the assertions to pass? Do they?
Modify the code for two_norm_s in amath583.cpp so that it adds the values of v in ascending order of its values.
To do this, make a copy of v and sort those values using std::sort as follows
Vector w(v); // w is a copy of v
std::sort(&w(0), &w(0)+w.num_rows());
What happens when you run norm_order.exe? Are the values of
norm2 and norm3 equal to norm0?
Note that the program takes a command line argument to set the max size of the vector. The default is 1M elements.
Answer these questions in Questions.rst:
At what problem size (in terms of the number of elements in the Vector) do the answers between the computed norms start to differ?
How do the absolute and relative errors change as a function of problem size?
Does the Vector class behave strictly like an algebraic vector space?
Do you have any concerns about this kind of behavior?
Exercises¶
Parallel Norm¶
For this problem we are going to explore parallelizing the computation of two_norm in a variety of different ways in order to give you some hands on experience with several of the common techniques for parallelization.
Each of the programs below consists of a header file for your implementation, a driver program, and a test program. The driver program runs the norm computation over a range of problem sizes, over a range of parallelizations. It also runs a sequential base case. It prints out GFlops/s for each problem size and for each number of threads. It also prints out the relative error between the parallel computed norm and the sequential computed norm.
Block Partitioning + Threads¶
Recall the approach to parallelization outlined in the Design Patterns for Parallel Programming. The first step is to find concurrency – how can we decompose the problem into independent (ish) pieces and then (second step) build an algorithm around that?
The first approach we want to look at with norm is to simply separate the problem into blocks. Computing the sum of squares of the first half (say) of a vector can be done independently of the second half. We can combine the results to get our final result.
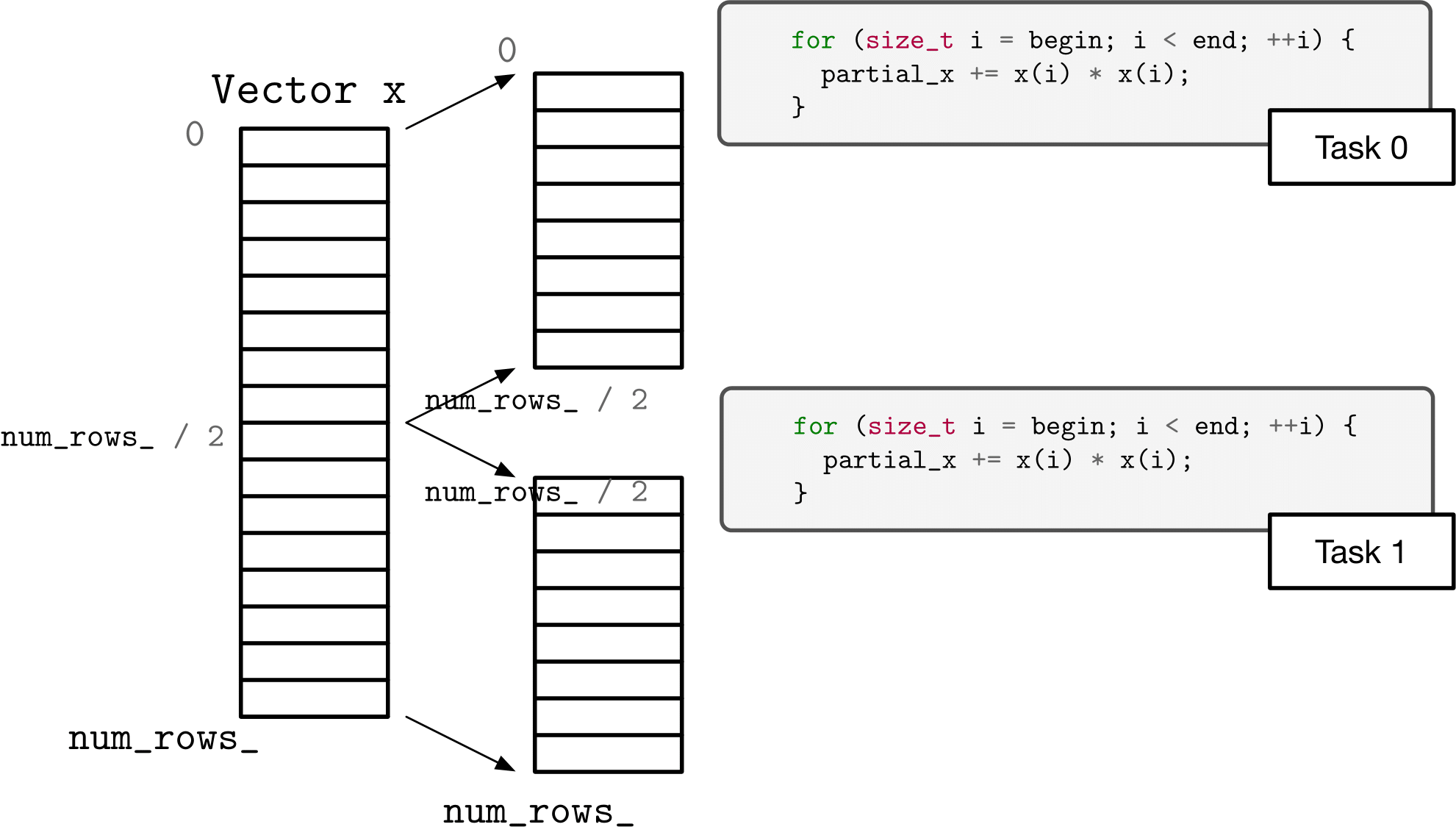
The program pnorm.cpp is a driver program that calls the function partitioned_two_norm_a in the file pnorm.hpp. The program as provided uses C++ threads to launch workers, each of which executes a specified block of the vector – from begin to end. Unfortunately, the program is not correct – more specifically, there is a race that causes it to give the wrong answer.
Fix the implementation of partitioned_two_norm_a in pnorm.hpp so that it no longer has a race and so that it achieves some parallel speedup. (Eliminating the race by replacing the parallel solution with a fully sequential solution is not the answer I am looking for.)
Answer the following questions in Questions.rst.
What was the data race?
What did you do to fix the data race? Explain why the race is actually eliminated (rather than, say, just made less likely).
How much parallel speedup do you see for 1, 2, 4, and 8 threads?
Block Partitioning + Tasks¶
One of the C++ core guidelines that we presented in lecture related to concurrent programming was to prefer using tasks to using threads – to think in terms of the work to be done rather than orchestrating the worker to do the work.
The program fnorm.cpp is the driver program for this problem. It calls the functions partitioned_two_norm_a and partitioned_two_norm_b, of which skeletons are provided.
Complete the function partitioned_two_norm_a in fnorm.hpp, using std::async to create futures. You should save the futures in a vector and then gather the returned results (using get) to get your final answer. Use std::launch::async as your launch policy. The skeletons in fnorm.hpp suggest using helper functions as the tasks, but you can use lambda or function objects if you like.
Once you are satisfied with partitioned_two_norm_a, copy it verbatim to
partitioned_two_norm_b in fnorm.hpp and change the launch policy from std::launch::async to std::launch::deferred.
Answer the following questions in Questions.rst.
How much parallel speedup do you see for 1, 2, 4, and 8 threads for
partitioned_two_norm_a?How much parallel speedup do you see for 1, 2, 4, and 8 threads for
partitioned_two_norm_b?Explain the differences you see between
partitioned_two_norm_aandpartitioned_two_norm_b.
Cyclic Partitioning + Your Choice¶
Another option for decomposing the two norm computation is to use a “cyclic” or “strided” decomposition. That is, rather than each task operating on contiguous chunks of the problem, each task operates on interleaved sections of the vector.
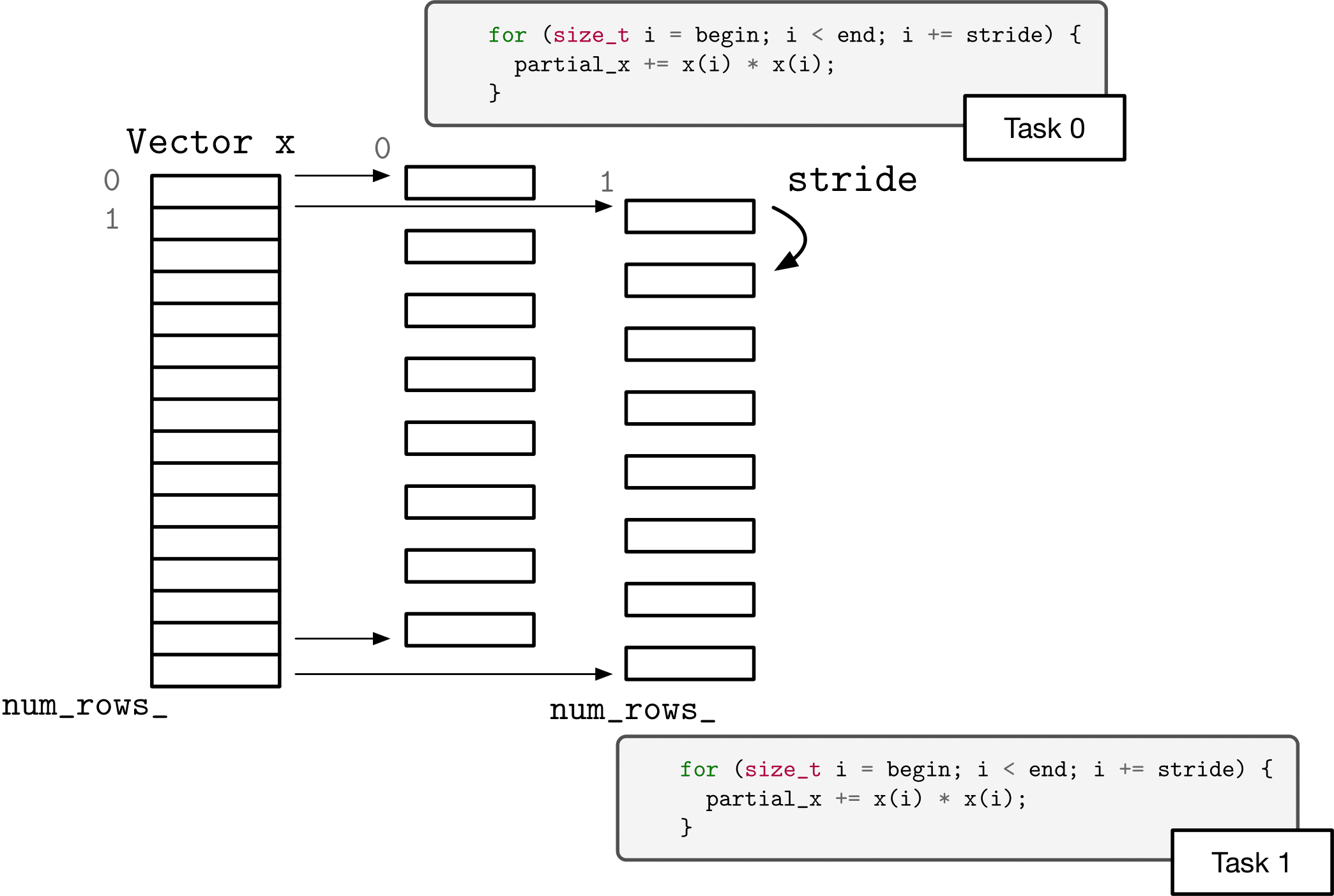
Complete the body of cyclic_two_norm in cnorm.hpp. The implementation mechanism you use is up to you (threads or tasks). You can use separate helper functions, lambdas, or function objects. The requirements are that the function parallelizes according to the specified number of threads, that it uses a cyclic partitioning (strides), and that it computes the correct answer (within the bounds of floating point accuracy).
Answer the following questions in Questions.rst.
How much parallel speedup do you see for 1, 2, 4, and 8 threads?
How does the performance of cyclic partitioning compare to blocked? Explain any significant differences, referring to, say, performance models or CPU architectural models.
Divide and Conquer + Tasks (AMATH 583 ONLY)¶
Another approach to decomposing a problem – particularly if you can’t (or don’t want to) try to divide it into equally sized chunks all at once – is to “divide and conquer.” In this approach, our function breaks the problem to be solved into two pieces (“divide”), solves the two pieces, and then combines the results. The twist is that to solve each of the two pieces (“conquer”), the function calls itself.
To see what we mean, suppose we want to take the sum of squares of the elements of a vector (as a precursor for computing the Euclidean norm, say) using a function sum_of_squares. Well, we can abstract that away by pretending we can compute the sum of squares of the first half of the vector and the sum of squares of the second half of the vector. And, we abstract that away by saying we can compute those halves by calling sum_of_sqares.
double sum_of_squares(const Vector& x, size_t begin, size_t end) {
return sum_of_squares(x, begin, begin+(end-begin)/2)
+ sum_of_squares(x, begin+(end-begin)/2, end) ;
}
To use an over-used phrase – see what I did there? We’ve defined the function as the result of that same function on two smaller pieces. This is completely correct mathematically, by the way, the sum of squares of a vector is the sum of the sum of squares of two halves of the vector.
Almost. It isn’t correct for the case where end - begin is equal to unity – we can no longer partition the vector. So, in this code example, as with the mathematical example in the sidebar, we need some non-self-referential value (a base case).
With this computation there are several options for a base case. We could stop when the difference between begin and end is unity. We could stop when the difference is sufficiently small. Or, we could stop when we have achieved a certain amount of concurrency (have descended enough levels).
In the latter case:
double sum_of_squares(const Vector& x, size_t begin, size_t end, size_t level) {
if (level == 0) {
double sum = 0;
// code that computes the sum of squares of x from begin to end into sum
return sum;
} else {
return sum_of_squares(x, begin, begin+(end-begin)/2, level-1)
+ sum_of_squares(x, begin+(end-begin)/2, end , level-1) ;
}
}
Now, we can parallelize this divide and conquer approach by launching asynchronous tasks for the recursive calls and getting the values from the futures.
The driver program for this problem is in rnorm.cpp.
Complete the implementation for recursive_two_norm_a in rnorm.hpp. Your implementation should use the approach outlined above.
Answer these questions in Questions.rst.
How much parallel speedup do you see for 1, 2, 4, and 8 threads?
What will happen if you use
std:::launch::deferredinstead ofstd:::launch::asyncwhen launching tasks? When will the computations happen? Will you see any speedup? For your convenience, the driver program will also callrecursive_two_norm_b– which you can implement as a copy ofrecursive_two_norm_abut with the launch policy changed.
General Questions¶
Answer these questions in Questions.rst.
For the different approaches to parallelization, were there any major differences in how much parallel speedup that you saw?
You may have seen the speedup slowing down as the problem sizes got larger – if you didn’t, keep trying larger problem sizes. What is limiting parallel speedup for two_norm (regardless of approach)? What would determine the problem sizes where you should see ideal speedup? (Hint: Roofline model.)
Conundrum #1¶
The various drivers for parallel norm take as arguments a minimum problem size to work on, a maximum problem size, and the max number of threads to scale to.
In the problems we have been looking at above, we started with a fairly large Vector and then scaled it up and we analyzed the resulting performance with the roofline model.
As we also know from our experience thus far in the course, operating with smaller data puts us in a more favorable position to utilize caches well.
Using one of the parallel norm programs you wrote above, run on some small problem sizes:
$ ./pnorm.exe 128 256
What is the result? (Hint: You may need to be patient for this to finish.)
There are two-three things I would like to discuss about this on Piazza:
What is causing this behavior?
How could this behavior be fixed?
Is there a simple implementation for this fix?
You may want to try using one of the profiling tools from the short excursus on profiling to answer 1 definitively.
Answer 1 and 2 (directly above) in Questions.rst.
Parallel Sparse Matrix-Vector Multiply¶
Your ps5 subdirectly has a program pmatvec.cpp. This is a driver program identical to matvec.cpp from the midterm, except that each call to mult now has an additional argument to specify the number of threads (equivalently, partitions) to use in the operation. E.g., the call to mult with COO is now
mult(ACOO, x, y, nthreads);
The program runs just like matvec.cpp – it runs sparse matvec and sparse transpose matvec over each type of sparse matrix (we do not include AOS) for a range of problem sizes, printing out GFlops/sec for each. There is an outer loop that repeats this process for 1, 2, 4, and 8 threads. (You can adjust problem size and max number of threads to try by passing in arguments on the command line.)
I have the appropriate overloads for mult in amath583sparse.hpp and amath583sparse.cpp. Right now, they just ignore the extra argument and call the matvec (and t_matvec) member function of the matrix that is passed in.
There are six total multiply algorithms – a matvec and a t_matvec member function for each of COO, CSR, and CSC. Since the calls to mult ultimately boil down to a call to the member function, we can parallelize mult by parallelizing the member function.
Partitioning Matrix Vector Product¶
But, before diving right into that, let’s apply our parallelization design patterns. One way to split up the problem would be to divide it up like we did with two_norm:
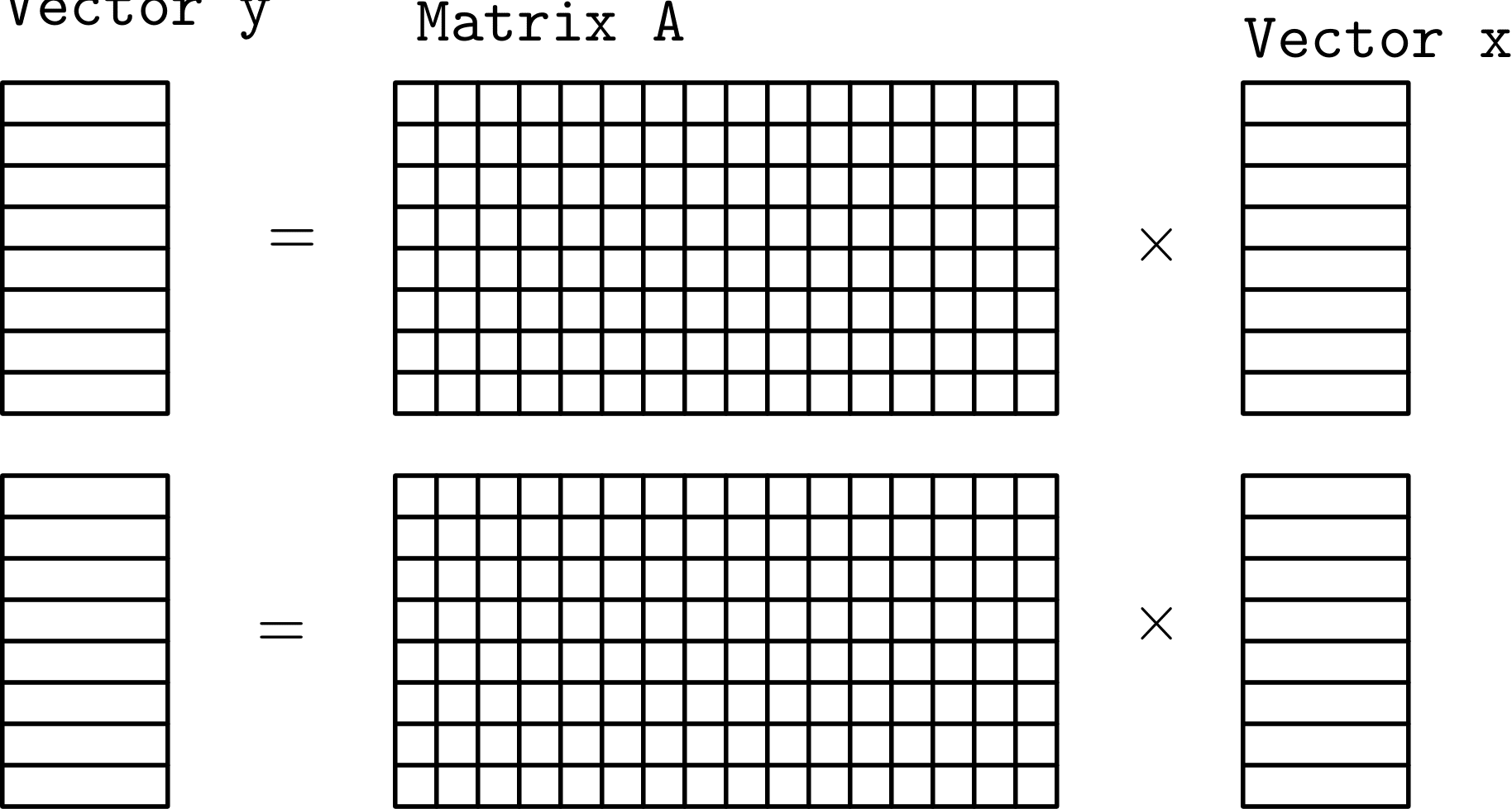
(For illustration purposes we represent the matrix as a dense matrix.)
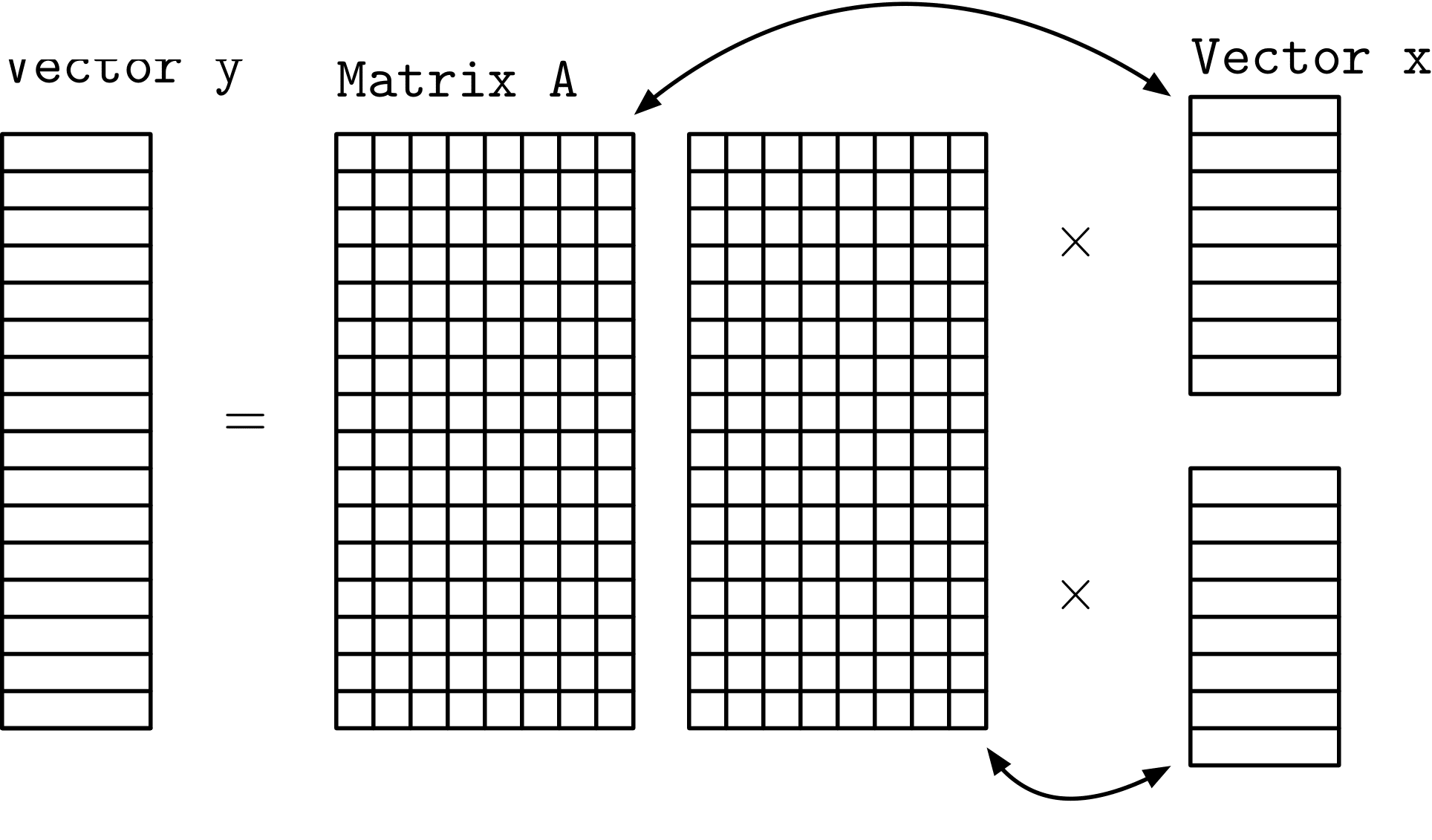
Conceptually this seems nice, but mathematically it is incorrect. Since we are partitioning the matrix so that each task has all of the columns of A we also need to be able to access all of the columns of x – so we can’t really partition x though we can partition y and we can partition A – row wise.
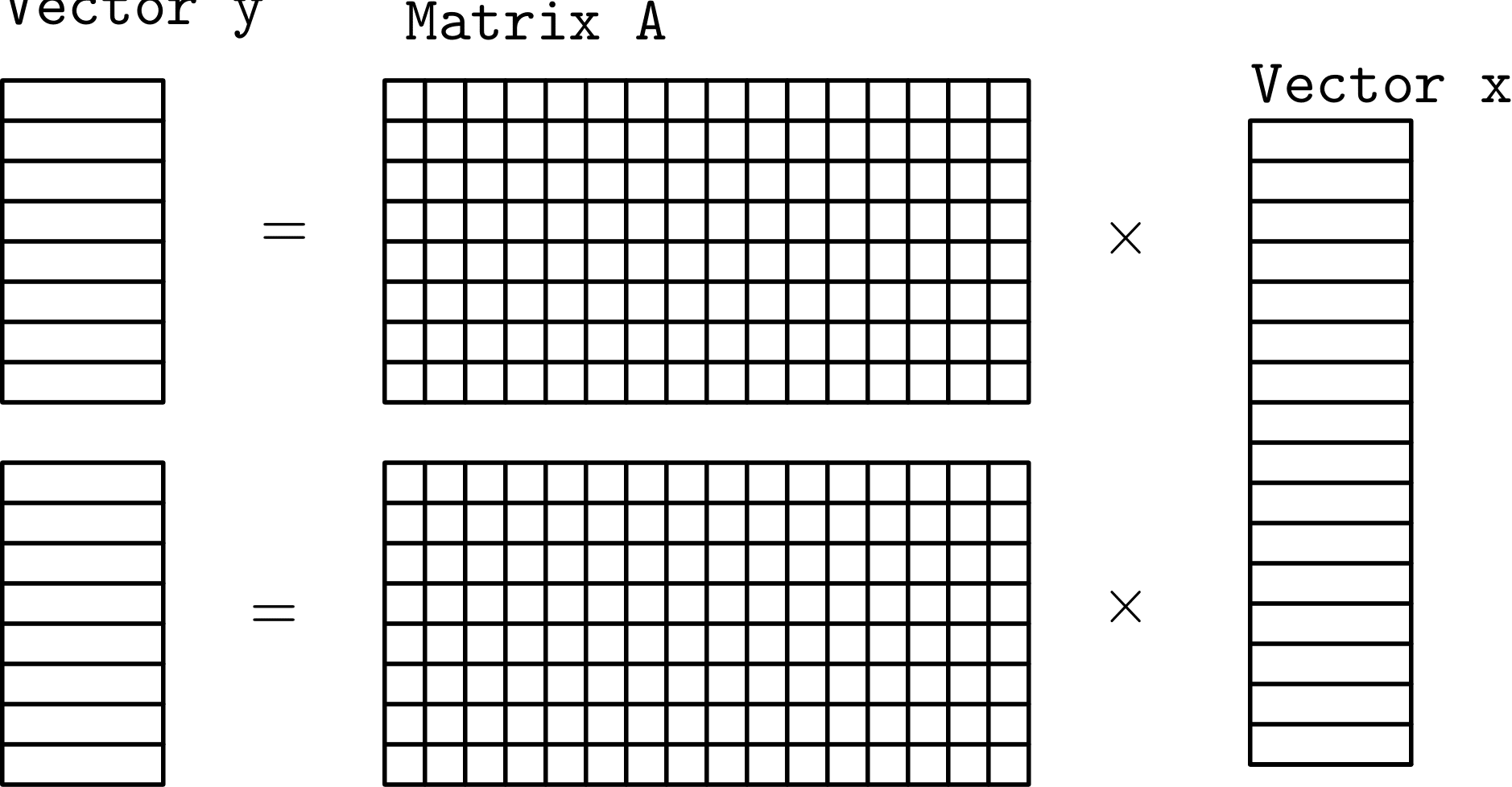
If we did want to split up x, we could partition A column wise but then each task has all of the rows of A so we can’t partition y.
(Answer not required in Questions.rst but you should think about this.)
What does this situation look like if we are computing the transpose product? If we partition A by rows and want to take the transpose product against x can we partition x or y? Similarly, if we partition A by columns can we partition x or y?
Partitioning Sparse Matrix Vector Product¶
Now let’s return to thinking about partitioning sparse matrix-vector product. We have three sparse matrix representations: COO, CSR, and CSC. If you count AOS as well, then we have four sparse matrix representations. We can really only partition CSR and CSC and we can really only partition CSR by rows and CSC by columns. (The looping over the elements in these formats is over rows and columns for CSR and CSC, respectively in the outer loop – which can be partitioned. The loop orders can’t be changed, and the inner loop can’t really be partitioned based on index range.)
So that leaves four algorithms with partitionings – CSR partitioned by row for matvec and transpose matvec and CSC partitioned by column for matvec and transposed matvec. For each of the matrix formats, one of the operations allowed us to partition x and the other to partition y.
(Answer not required in Questions.rst but you should think about this and discuss on Piazza.)
Are there any potential problems with not being able to partition x?
Are there any potential problems with not being able to partition y?
(In parallel computing, “potential problem” usually means race condition.)
Implement the safe-to-implement parallel algorithms as the appropriate overloaded member functions in CSCMatrix.hpp and CSRMatrix.hpp. The prototype should be the same as the existing member functions, but with an additional argument specifying the number of partitions. You will need to add the appropriate #include statements for any additional C++ library functionality you use. You will also need to modify the appropriate dispatch function in amath583sparse.cpp (these are already overloaded with number of partitions but only call the sequential member functions) – search for “Fix me”.
Answer the following in Questions.rst.
Which methods did you implement?
How much parallel speedup do you see for the methods that you implemented for 1, 2, 4, and 8 threads?
Accelerating PageRank¶
Your ps5 subdirectory contains a program pagerank.cpp. It takes as an argument a file specifying a graph (a set of connections), creates a right stochastic sparse matrix with that and then runs the pagerank algorithm. The program also takes optional flag arguments
$ ./pagerank.exe
Usage: ./pagerank.exe [-l label_file] [-a alpha] [-t tol] [-n num_threads] [-i max_iters] [-v N] input_file
The -l option specifies an auxiliary file that can contain label information for the entities being ranked (there is only one example I have with a label file), the -a option specifies the “alpha” parameter for the pagerank algorithm, -t specifies the convergence tolerance, -n specifies the number of threads to run with the program, -i specifies the maximum number of iterations to run of the pagerank algorithm, and -v specifies how many entries of the (ranked) output to print.
There are some small examples files in the ps5/data subdirectory:
$ ./pagerank.exe -l data/Erdos02_nodename.txt -v 10 data/Erdos02.mtx
# elapsed time [read]: 8 ms
Converged in 41 iterations
# elapsed time [pagerank]: 2 ms
0 0.000921655
1 0.00149955
2 0.000289607
3 0.00148465
4 0.000905182
5 0.00141333
6 0.000174406
7 0.00106162
8 0.000445909
9 0.000400393
# elapsed time [rank]: 0 ms
0 6926 0.0190492 ERDOS PAUL
1 502 0.0026224 ZAKS, SHMUEL
2 303 0.00259231 MCELIECE, ROBERT J.
3 444 0.00256273 STRAUS, ERNST GABOR*
4 261 0.00252477 KRANTZ, STEVEN GEORGE
5 391 0.00240435 SALAT, TIBOR
6 354 0.00239376 PREISS, DAVID
7 299 0.0023167 MAULDIN, R. DANIEL
8 231 0.00230076 JOO, ISTVAN*
9 474 0.00223145 TUZA, ZSOLT
This prints the time the program ran and since we had specified 10 to the -v option, it prints the first 10 values of the pagerank vector and then the entries corresponding to the 10 largest values. Since we had a label file in this case we also printed the associated labels. As expected, Paul Erdos is at the top.
The file Erdos02.mtx contains a co-authorship list of various authors. Running pagerank on that data doesn’t compute Erdos numbers, but it does tell us (maybe) who are the “important” authors in that network.
Erdos02.mtx is a very small network – 6927 authors and 8472 links and our C++ program computes its pagerank in just few milliseconds – hardly worth the trouble to accelerate. However, many problems of interest are much larger (such as the network of links in the world wide web).
Graph Data Files¶
I have uploaded a set of data files that are somewhat larger – enough to be able to see meaningful speedup with parallelization but not so large as to overwhelm your disk space or network connection (hopefully). The Piazza announcement about this assignment has a link to the OneDrive folder containing the files.
Several of the graphs are available either in ASCII format (“.mtx”) or binary format (“.mmio”) or both. I suggest using the binary format as that will load much more quickly when you are doing experiments.
If you want to find out more specific information about any of these graphs, they were downloaded from https://sparse.tamu.edu where you can search on the file name to get all of the details.
Profiling¶
Run pagerank.exe as it is (unaccelerated) on some of the large-ish graphs. You should be seeing compute times on the order of a few seconds to maybe ten or so seconds.
I checked the pagerank program with a profiler and found that it spends a majority of its time in mult, more specifically in CSR::t_matvec. This is the function we want to speed up.
(And by speeding up – I mean, maybe, use – since we already sped it up above. If you add the number of partitions as an argument to mult, the program should “work”.)
Note
Calibration point
Your ps5 subdirectory also contains a python pr.py file with the networkx pagerank algorithm, which is more or less what is implemented in pagerank.hpp. I added a small driver to measure time taken for various operations (I/O, pagerank itself, sorting).
Try running it on a small example problem (like Erdos)
$ python3 pr.py data/Erdos02.mtx
How much faster is the C++ version than the python version? How long would one of the larger graphs you tried with pagerank.exe be expected to take if the same ratio held?
Conundrum #2¶
Or is CSR::t_matvec the function we want to speed up?
Ideally, we would just add another argument to the call to mult in pagerank and invoke the parallel version. But getting high performance from an application involves creating the application so it functions efficiently as a whole. As the creator of the application, you get to (have to) make the decisions about what pieces to use for a particular situation.
In the case of pagerank.cpp I wrote this initially using the CSR sparse matrix format – that’s usually a reasonable default data structure to use. But, in pagerank we are not calling CSR::matvec rather we are calling CSR::t_matvec – which would be fine – for a purely sequential program. And now we want to parallelize it to improve the performance.
But, we have control over the entire application. We don’t need to simply dive down to the most expensive operation and parallelize that. We can also evaluate the application as a whole and think about some of the other decisions we made – and perhaps make different decisions that would let us accomplish the acceleration we want to more easily.
To be more specific. Above we noted that only two of the six “matrix vector” multiply variants were actually amenable to partition-based parallelization. Since mult is the kernel operation in pagerank, we should think about perhaps choosing an appropriate data structure so that we can take advantage of the opportunities for parallelization. And realize also we don’t have to call the transpose matrix product to compute the transposed product (we could send in the transposed matrix).
The second discussion I would like to see on Piazza is:
What are the two “matrix vector” operations that we could use?
How would we use the first in pagerank? I.e., what would we have to do differently in the rest of pagerank.cpp to use that first operation?
How would we use the second?
Answer these questions also in Questions.rst.
Implement one of the alternatives we discuss as a class.
For this problem – and this problem only – you may share small snippets of code on Piazza. It’s okay if everyone turns in the same two (or so) solutions – but everyone needs to actually put the code into the right place in their files and compile and run themselves. You should not need to change anything but the files pagerank.hpp and pagerank.cpp so snippets of shared code should be restricted to those files. Don’t reveal answers, for instance, from the sparse matrix-vector multiply implementations.
What is the largest graph you solved?
Submitting Your Work¶
Submit your files to Gradescope. To log in to Gradescope, point your browser to gradescope.com and click the login button. On the form that pops up select “School Credentials” and then “University of Washington netid”. You will be asked to authenticate with the UW netid login page. Once you have authenticated you will be brought to a page with your courses. Select amath583sp22.
There you will find four assignments : “ps5 – written (for 483)”, “ps5 – written (for 583)”, “ps5 – coding (for 483)”, and “ps5 – coding (for 583)”. For the coding part, please submit the files you did modify:
amath583.cpp (todo 1, 2)
pnorm.hpp (todo 3)
fnorm.hpp (todo 4, 5)
cnorm.hpp (todo 6)
rnorm.hpp (todo 7, AMATH 583 only)
CSCMatrix.hpp (todo 8)
CSRMatrix.hpp (todo 8)
pagerank.{cpp,hpp} (todo 9)
The autograder should provide you feedback within 10 minutes after the submission. Please contact TAs if you see “Autograder failed to execute correctly”. Do not attach the code – they will have access to your submission on Gradescope.
For the written part, you will need to submit your Questions.rst as a PDF file. You can use any modern text processor (Word, Pages, TextEdit, etc), or console tools like pandoc or rst2pdf, to convert it to a PDF file. Please make sure to match the relevant pages of your pdf with questions on Gradescope.
In this assignment, question 8 and coding To-Do 7 are for AMATH583 only, if you are a 583 student, please submit your answers for those to the assignments “ps5 – written (for 583)” and “ps5 – coding (for 583)” on Gradescope. Note that you could have your work in a single pdf file which you could submit for both written assignments, however, you would need to make sure that correct pages are selected for each question.
If you relied on any external resources, include the references in your document as well.